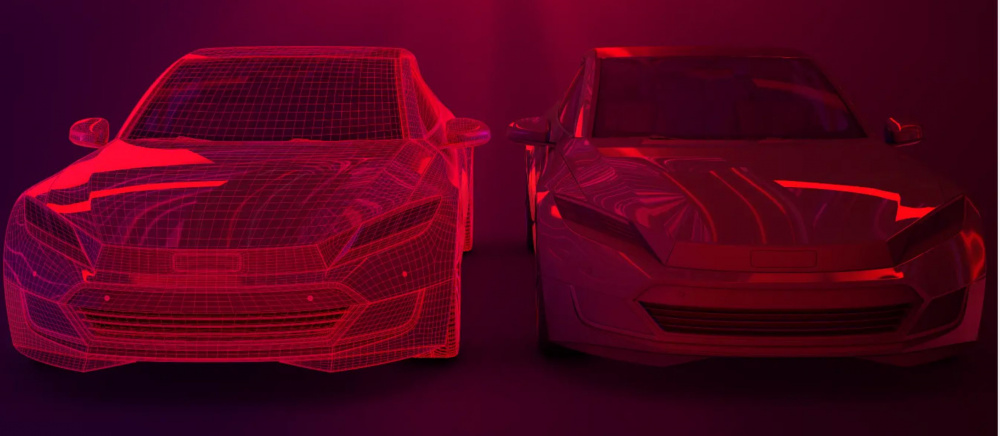
Daha güvenli ve akıllı mobiliteye doğru ilerleyen yarışta, Gelişmiş Sürücü Destek Sistemleri (ADAS) ve Otonom Sürüş (AD) teknolojileri artık araştırma ve konsept aşamasındaki yaklaşımlar olmaktan çıkmış, otomotiv geliştirme süreçlerinin temel unsurları haline gelmiştir. Ancak, bu sistemler giderek daha karmaşık hale geldikçe, bunları doğrulama zorluğu da artmaktadır. Geleneksel yol testleri pahalı, tekrarlanamaz ve zaman alıcıdır. Peki, bu sistemlerin güvenli, güvenilir ve gerçek dünyaya hazır olduğunu nasıl garanti edebiliriz?
Safety.AD'de ve ESTECO'nun (dijital mühendislik alanında uzmanlaşmış bağımsız bir yazılım şirketi) blog yazısında yakın zamanda tartışıldığı gibi, geliştirme sürelerinin kısalması ve maliyetleri düşürme baskısı olmasına rağmen, yeni ADAS ve AD işlevlerini test etmenin önemi devam etmektedir. Aslında, sektörün yazılım simülasyonlarını gerçek dünya yol testleriyle uyumlu hale getirmek için yeni yollar araması giderek daha önemli hale gelmiştir.
Bu sorunu çözmek için ESTECO, IPG Automotive, Keysight ve TNO ile işbirliği içinde ADAS/AD işlev doğrulaması için yapılandırılmış ve otomatikleştirilmiş bir yaklaşım geliştirmiştir. Bu yaklaşım; simülasyon, donanım-döngüsü-içinde (HIL) testler ve fizik tabanlı olasılıksal modellemeyi entegre ederek ölçeklenebilir ve sağlam bir doğrulama süreci sunar. Bu metodoloji, simülasyon yoluyla erken aşamada arıza ve sınır durum tespitine verilen artan sektör odağıyla da uyumludur.
Sorun: Karmaşıklık, Maliyet ve Kapsam
ADAS/AD işlevlerinin; kentsel trafik, otoyollar ve kırsal yollar dâhil olmak üzere çok çeşitli Operasyonel Tasarım Alanlarında (ODD) güvenli şekilde çalışması gerekir. Bu işlevlerin doğrulanması sırasında aşağıdaki faktörler dikkate alınmalıdır:
- Çok sayıda ve kombinatoryal olarak artan senaryo varyasyonu
- Yazılım Tanımlı Araçlar (SDV) kapsamında üretim sonrası güncellemeler
- Sürekli evrilen algoritmalar ve sensör davranışları
- SOTIF (ISO 21448) ve Fonksiyonel Güvenlik – FuSa (ISO 26262) gereksinimleri
Yol testleri tek başına yeterli değildir. Maliyetlidir, tekrarlanamaz ve kapsamı sınırlıdır. Simülasyon devreye girer. ADAS/AD doğrulamasının karmaşıklığı, çok çeşitli Operasyonel Tasarım Alanlarında (ODD'ler) güvenli çalışmayı sağlama ihtiyacından kaynaklanmaktadır. Bu alanlar, kentsel kavşaklardan kırsal otoyollara kadar her şeyi kapsar ve her biri kendine özgü zorluklar sunar. Dahası, Yazılım Tanımlı Araçların (SDV) yükselişi, üretim sonrası güncellemeler ve gelişen algoritmaların sürekli doğrulama gerektirmesi nedeniyle ek karmaşıklık katmanları getirir. SOTIF (Amaçlanan İşlevselliğin Güvenliği) ve ISO 26262 gibi standartlar, titiz güvenlik güvencesinin önemini daha da vurgular.
Tarihsel olarak OEM’ler ve Tier-1 tedarikçiler, sistem doğrulaması için X-in-the-Loop metodolojilerini kullanmıştır. Bu yaklaşım genellikle Software-in-the-Loop (SIL) ile başlar ve aşamalı olarak gerçek donanımın entegrasyonuna ilerler. Güç aktarma sistemi ve şasi gibi geleneksel alanlarda etkili olan ADAS, yeni zorluklar getirmektedir. Sensör davranışı yüksek doğrulukla modellenmelidir ve ADAS işlevlerinin dağıtık yapısı, test sistemleri arasında daha sıkı bir entegrasyon gerektirmektedir.
Çözüm: Çoklu Ortak Doğrulama Süreci
Safety.AD'de tartışılan deney, yazılım simülasyonundan laboratuvar ortamında sahne oluşturmaya, yol testlerine ve güvenlik risklerini azaltacak standartlara uygunluğa kadar tüm iş akışını sergiledi.
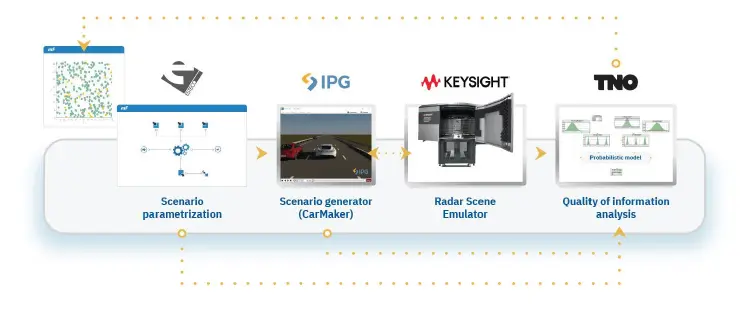
Adım 1: modeFRONTIER + CarMaker ile Senaryo Oluşturma
ESTECO, modeFRONTIER kullanarak IPG Automotive CarMaker ortamında test senaryolarının oluşturulmasını otomatikleştirir. Araç hızı, çarpışma zamanı (Time-to-Collision, TTC), ivme ve mesafe gibi parametreler; gerçek sürüş verilerinden elde edilen istatistiksel dağılımlara göre varye edilir.
Bu, laboratuvardan hiç çıkmadan gerçekçi sürüş koşullarını yansıtan sentetik senaryolardan oluşan bir veri havuzu oluşturur.
ESTECO'nun çözümü, IPG Automotive'in simülasyon çözümü CarMaker içinde test senaryolarının oluşturulmasını otomatikleştiren modeFRONTIER kullanılarak senaryo oluşturma ile başlar. Bu kurulum, daha sonra çeşitli koşullar altında sistem performansını değerlendirmek için temel oluşturur.
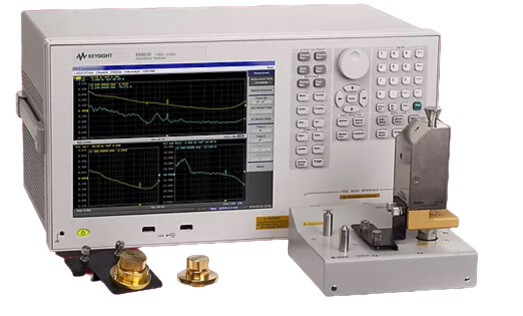
Adım 2: Keysight RSE ile Gerçekçi Radar Emülasyonu
Radar davranışını simüle etmek oldukça zordur. Özel filtreleme algoritmaları ve çevresel gürültü, gerçek dünyadaki sensör tepkilerini taklit etmeyi zorlaştırır.
Keysight Radar Scene Emulator (RSE), yüksek çözünürlüklü radar yankılarını emüle eden rixel (RF transceiver) mimarisi sayesinde bu ihtiyacı karşılar. CarMaker ile entegre olan RSE, simülasyon ortamından son derece gerçekçi radar yankıları oluşturarak ve gerçek radar donanımının gerçek dünya koşullarında olduğu gibi tepki vermesini sağlayarak donanım döngüsü içinde (HIL) test yapılmasına olanak tanır.
Bu yaklaşım, laboratuvar tabanlı testlerin tekrarlanabilirliği ile tam araç entegrasyonunun gerçekçiliğini birleştiren Vehicle-in-the-Loop (VIL) testlerine kadar ölçeklenebilir. Hem HIL hem de VIL yapılandırmalarında, radar sensörü dış etkenlerden izole edilmiş kapalı bir odaya yerleştirilir ve simüle edilen ortamla senkronize edilir. Bu kurulum, hava koşullarından veya pistin kullanılabilirliğinden bağımsız olarak 7/24 gerçekleştirilebilen sürekli ve tekrarlanabilir testlere olanak tanır. Daha fazla bilgi için Keysight'tan Henrik Liebau'nun bu makalesini okuyabilirsiniz.
Adım 3: TNO ile Olasılıksal Modelleme
Simülasyon ve emülasyon verileri toplandıktan sonra, TNO tarafından fizik bilgisine dayalı olasılıksal bir model oluşturulur. Bu model:
- Algılama performansını, konumlandırma doğruluğunu ve nesne boyutlandırmayı değerlendirir
- Sistem arızalarına katkıda bulunan çevresel ve yapısal faktörleri belirler
- İleri yönlü performans tahmini ve geriye dönük sınır durum analizi yapılmasına olanak tanır
Bir vaka çalışmasında, korkuluğun varlığının radar algılamasını engellediği ve potansiyel yanlış negatif sonuçlara yol açtığı gösterilmiştir. TNO'nun modeli bu riski nicelendirerek çevresel faktörlerin güvenliği nasıl tehlikeye atabileceğini göstermiştir. Simülasyon ve emülasyon verileri toplandıktan sonra, TNO fizik bilgisine dayalı olasılıksal bir model uygulayarak sistem güvenilirliğini analiz eder. Bu model, algılama performansını, konumlandırma doğruluğunu ve nesne boyutlandırmayı değerlendirirken, sistem arızalarına katkıda bulunan faktörleri de belirler.
Etki: Verimlilik, Şeffaflık ve Güvenlik
Bu otomatikleştirilmiş süreç, geliştirme yaşam döngüsü boyunca birçok önemli avantaj sağlar:
- Önceden yüklenmiş sanal testler sayesinde daha kısa geliştirme döngüleri
- Sertifikasyon ve uyumluluğu desteklemek için objektif risk ölçümü
- Optimize edilmiş kaynak kullanımı, fiziksel prototiplere ve yol testlerine olan bağımlılığı azaltır
- Yasal gereklilikleri karşılamak için sonuçların şeffaf bir şekilde izlenebilirliği
- Çevresel etkiyi en aza indirerek sürdürülebilirliği artırır
En önemlisi, sistem sürekli, otomatik testlere olanak tanır — 7/24 ve hava koşullarından veya pistin kullanılabilirliğinden bağımsız olarak. Testleri sürecin daha erken aşamalarına kaydırarak ve fiziksel bağımlılıkları azaltarak, ekipler daha hızlı yinelemeler yapabilir, veriye dayalı kararlar alabilir ve daha kapsamlı doğrulamalar yapabilir.
Sırada ne var?
Ekip, ileriye dönük olarak olasılık modelini genişleterek, yol yüzeylerinden yansımalar ve karmaşık manevralar sırasında nesne birleşimi gibi ek yetersizlikleri de dahil etmeyi planlıyor. Ayrıca, gerçek araç dinamiklerini ve çalıştırma tepkilerini dahil etmeyi, kritik test durumlarını belirlemek için optimizasyon döngüsünü otomatikleştirmeyi ve araç risk performansını daha kesin bir şekilde ölçmeyi hedefliyorlar. Nihai hedef, her bir ortağın fikri mülkiyet korumasını sürdürürken ve veri izlenebilirliğini sağlarken katkıda bulunabileceği, kurumsal kullanıma hazır bir ortam yaratmaktır.
Sonuç olarak, ESTECO, IPG Automotive, Keysight ve TNO arasındaki işbirliği, ADAS/AD işlevlerinin sanal test ve doğrulaması için güçlü bir çözüm sunmaktadır. Simülasyon, emülasyon ve olasılıksal modellemeyi bir araya getiren bu yaklaşım, otomotiv OEM'leri ve Tier 1 tedarikçilerinin daha güvenli, daha güvenilir sistemler geliştirirken pazara sunma süresini kısaltmalarını ve maliyetleri azaltmalarını sağlar. Bu sadece otomasyonla ilgili değil, otonom mobilitenin geleceğine güven oluşturmakla da ilgilidir.