İlk blog yazımızda, yazılım tanımlı araçları (SDV) tanımlayan unsurları ve bunların otomotiv endüstrisi için neden bir dönüm noktası olduğunu incelemiştik.
Bu bölümde, SDV’leri mümkün kılan mimari dönüşümü daha derinlemesine ele alıyoruz. Otomotiv sektörü donanım odaklı tasarımlardan yazılım öncelikli platformlara geçerken, bu değişim araç mimarisini temelden yeniden şekillendiriyor.
Peki araç mimarisinde tam olarak ne değişiyor ve bu dönüşüm mobilitenin geleceği açısından neden bu kadar kritik?
SDV’lerin tam olarak hayata geçirilmesini anlamak için araç mimarisinin ve yazılım entegrasyonunun evrimine bakmak gerekir.
Keysight, PwC gibi endüstri liderleriyle aynı görüşü paylaşarak SDV olgunluk sürecinin, otonom sürüşteki SAE seviyelerine benzer biçimde Seviye 0’dan Seviye 5’e kadar tanımlanabileceğini öne sürmektedir.
Aşağıdaki tablo, mekanik olarak kontrol edilen sistemlerden tamamen entegre, bulut tabanlı ekosistemlere kadar SDV olgunluğunun temel aşamalarını özetlemekte ve her seviyenin mimari, yetenek ve iş potansiyeli açısından bir öncekini nasıl geliştirdiğini göstermektedir.
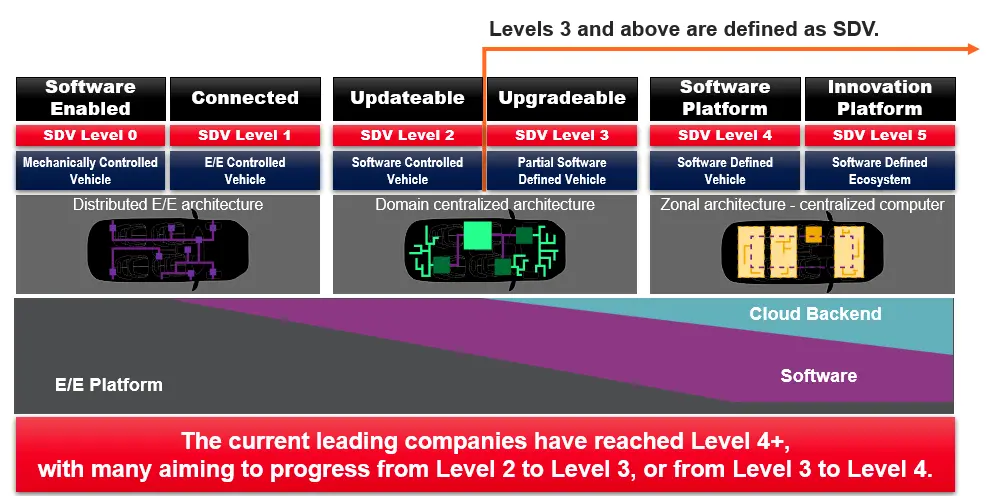
Şekil 1. Beş seviyede temsil edilen SDV'lerin evrimi
Yazılım Yığını Neden Oyunun Kurallarını Değiştiriyor?
Sektör SDV olgunluk eğrisinde ilerledikçe, birçok üretici şu anda Seviye 2 → Seviye 3 veya Seviye 3 → Seviye 4 geçişindedir.
Önde gelen oyuncular ise Seviye 4 ve ötesinde faaliyet göstermektedir.
Bu noktada, yazılımın yalnızca destekleyici bir unsur olmaktan çıktığı açıkça görülmektedir. Yazılım artık inovasyonun, rekabetçi farklılaşmanın ve uzun vadeli değer yaratmanın temel itici gücü haline gelmiştir.
Daha düşük olgunluk seviyelerinde yazılım genellikle izole edilmiş işlevleri geliştirirken, araçlar evrildikçe yazılım tüm araç deneyiminin merkezine yerleşir — temel fonksiyonlardan güvenlik sistemlerine, kullanıcı etkileşiminden hizmet sunumuna kadar her şeyi kapsar.
Kablosuz (OTA) güncellemeler ve modüler yazılım yığınları, üreticilerin araç fabrikadan çıktıktan sonra bile yeni özellikler ve iyileştirmeler sunmasını mümkün kılar.
Olgunluğun en üst seviyelerinde araçlar dijital platformlara dönüşür:
-
Uygulama ekosistemlerini destekler,
-
Üçüncü taraf entegrasyonlarını mümkün kılar,
-
Gerçek zamanlı verilere dayalı, kişiselleştirilmiş hizmetler sunar.
Bu yaklaşım, öngörücü bakım, kullanıma dayalı sigorta ve dinamik performans optimizasyonu gibi veri odaklı iş modellerinin önünü açar.
Tüm bunlar, ölçeklenebilir, güvenli ve hizmet odaklı bir yazılım mimarisiyle mümkün hale gelir.
SDV platformu aynı zamanda otonom sürüş, robotaksi ve tele-sürüş gibi yapay zekâ tabanlı mobilite konseptlerinin temelini oluşturur.
Miras: Alan (Domain) Odaklı Mimari
Geleneksel olarak araçlar, bilgi-eğlence, güç aktarma, gövde kontrolü, ADAS gibi her bir işlevsel alanın kendi Elektronik Kontrol Üniteleri (ECU) seti tarafından yönetildiği alan tabanlı (domain-based) mimariyle tasarlanmıştır.
Bazı araçlarda 80’in üzerinde ECU bulunabilir. Bu ECU’lar belirli donanım ve yazılımlarla sıkı biçimde bağlıdır ve birbirinden izole alanlar oluşturur.
Bu mimarinin temel özellikleri:
-
Çoklu ECU alanları: Her alan, kendine özgü ECU’lardan oluşur.
-
Heterojen BUS sistemleri: Alan içi ve alanlar arası iletişim nokta-nokta gerçekleşir.
-
Yoğun kablolama: Araç boyunca yayılan sinyaller, karmaşık ve ağır kablo demetlerine (+50 kg bakır kablo) neden olur.
Bu yaklaşım, işlevlerin ayrımını kolaylaştırsa da önemli sınırlamalar getirir:
-
Araç başına çok sayıda, işlevleri çakışan ECU
-
Her ECU için ayrı kontrolcü ve yazılım gereksinimi
-
Yedek donanım ve kablolama nedeniyle artan ağırlık ve maliyet
-
Yazılım güncelleme ve özellik genişletmede kısıtlı esneklik
-
Parçalanmış sistem yapısı nedeniyle yüksek entegrasyon ve bakım maliyeti
Alan odaklı mimari geçmişte iyi hizmet etmiş olsa da, işlevsel silolar, düşük ölçeklenebilirlik ve SDV dönüşümüne engel oluşturan bir yapı haline gelmiştir.
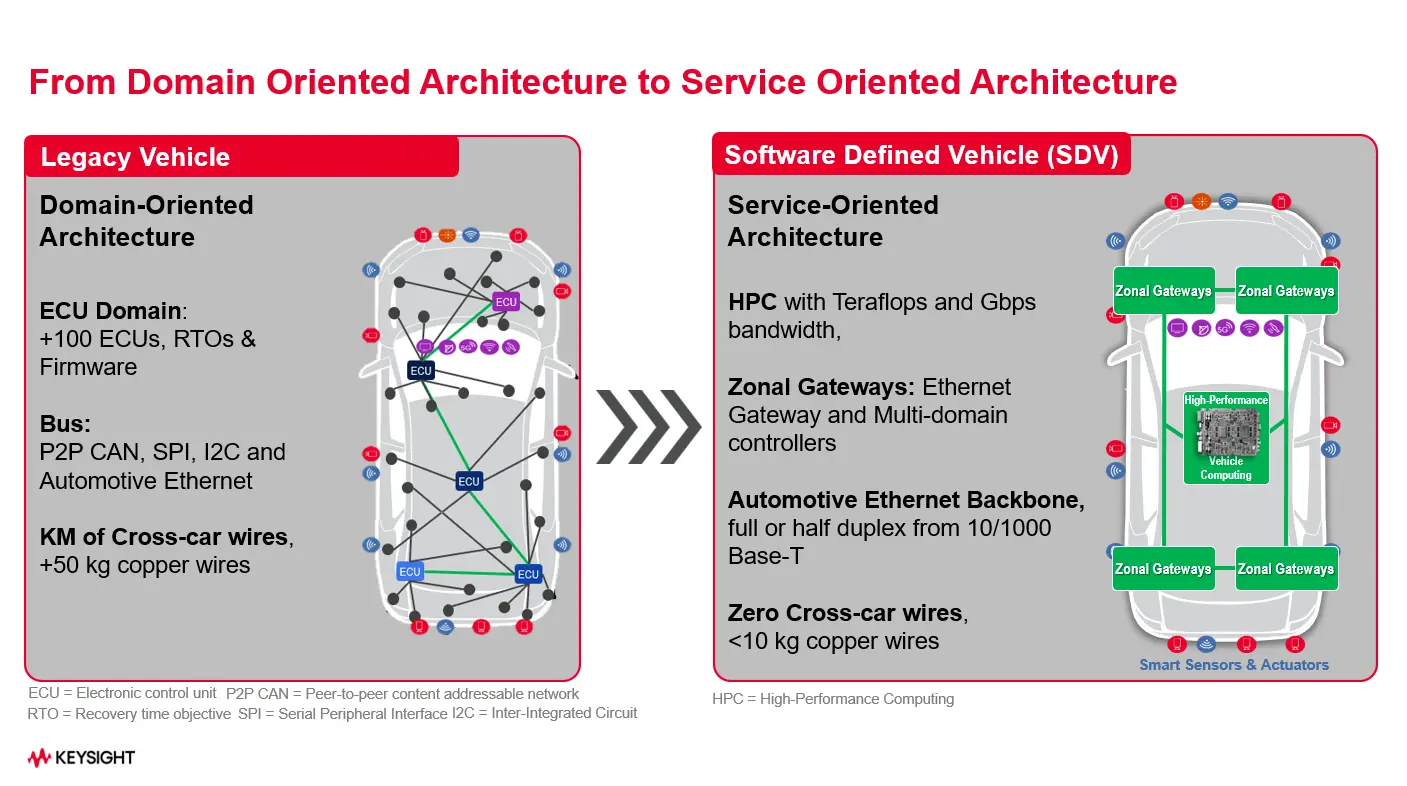
Şekil 2. Etki Alanı Odaklı Mimari'den Hizmet Odaklı Mimari'ye
Değişim: Bölgesel (Zone) ve Hizmet Odaklı Mimari
Bölgesel mimari, aracın elektronik sistemlerini işlevsel alanlar yerine fiziksel bölgelere (örneğin ön sol, arka sağ) göre yeniden düzenler.
Her bölge, yakındaki sensör ve aktüatörlerden gelen verileri toplayan güçlü bir bölgesel denetleyici tarafından yönetilir.
Bu denetleyiciler, araç genelinde yüksek hızlı, düşük gecikmeli iletişim sağlayan otomotiv Ethernet üzerinden merkezi bir Yüksek Performanslı Bilgisayar (HPC) birimine bağlanır.
Tarihsel olarak CAN ve LIN protokolleri araç içi iletişimin temelini oluşturmuştur. Ancak, alan ve bölge mimarilerine geçişle birlikte bu protokollerin sınırlamaları belirginleşmiştir.
Günümüzde SDV’ler için 10BASE-T1S Ethernet, düşük hızda ancak yüksek düğüm sayısına sahip uygulamalar için optimize edilmiş, hafif ve uygun maliyetli bir çözüm sunar.
Bu sistem, ECU’lar ve sensör ağları arasında çok noktalı iletişimi mümkün kılar ve hem deterministik hem de deterministik olmayan işlevleri destekler.
Bu donanım dönüşümü, yazılım mimarisindeki değişimle doğrudan ilişkilidir — işlev tabanlı yazılımlardan Hizmet Odaklı Mimariye (SOA) geçiş.
SOA yapısında, navigasyon, iklim kontrolü veya şerit takip gibi işlevler modüler, yeniden kullanılabilir ve bağımsız olarak güncellenebilir hizmetler olarak sunulur.
Bölgesel Mimariyi Destekleyen Temel Bileşenler
-
Yüksek Performanslı Bilgisayarlar (HPC): Gerçek zamanlı karar alma ve yazılım yürütme merkezi.
-
Otomotiv Ethernet: Tek TCP/IP altyapısı üzerinden çok noktalı, yüksek hızlı, düşük gecikmeli iletişim.
-
Yerelleştirilmiş kablolama: Sensörler en yakın bölgesel denetleyiciye bağlanarak kablo ağırlığını azaltır.
-
Hizmet Odaklı Yazılım: Donanımdan bağımsız, API tabanlı iletişim ve veri paylaşımı sağlar.
Bu geçiş;
-
ECU sayısını azaltarak sistemi basitleştirir,
-
Arıza riskini ve bakım maliyetini düşürür,
-
Araç montajını ve üretim sürecini hızlandırır,
-
OTA güncellemeleriyle sürekli gelişen yazılım ekosistemine zemin hazırlar.
Ayrıca, CI/CD/CT iş akışları ve modüler geliştirme sayesinde çeviklik artar, üçüncü taraf hizmetlerle entegrasyon kolaylaşır ve sürekli inovasyon mümkün olur.
Geleceğe Bakış
Bu mimari dönüşüm sadece teknik bir güncelleme değil, aynı zamanda stratejik bir yeniden yapılanmadır.
Otomobil üreticileri, standartlaştırılmış donanımlar ve modüler bileşenlerle yazılımı donanımdan ayıran, ölçeklenebilir, güvenli, bulut bağlantılı platformlar inşa etmelidir.
Bu yalnızca daha fazla yazılım eklemekle ilgili değil — aracın kendisini dinamik, güncellenebilir bir dijital platform olarak yeniden tasarlamakla ilgilidir.
SDV çağında yazılım, inovasyonun, farklılaşmanın ve uzun vadeli müşteri değerinin motoru haline gelir.
Gelecek; yazılımın sadece araç özelliklerini değil, tüm kullanıcı deneyimini tanımladığı, sürekli evrilen bir mobilite vizyonuna doğru ilerliyor.
Bir sonraki SDV Serisi blog yazısında, SDV dönüşümüyle birlikte ortaya çıkan iş zorluklarını ve organizasyonların bu dönüşümü aktif olarak yönlendirip rekabet avantajı elde etme stratejilerini inceleyeceğiz.